XSmile2008
New member
Делаю дипломную работу в институт. Решил сделать робота на Arduino. Хочу с Android телефона, ноутбука посылать команды на адруино через esp8266. Как лучше это все реализовать? Пробовал использовать Arduino IDE для прошивки модуля, модифицировал пример ESP8266/WiFiWebServer, там где светодиод включает/выключает. Добавил обработку HTTP запросов на движение вперед/назад/всево/вправо. Оно заработало но после одной, максимум двух выполненых команд модуль переставал отвечать на запросы или перезагружался, да и скорость выполнения первых была с задержкой в пол секунды-секунду, что очень много. Схема подключения такая, что модуль связан через пины 0, 1 с ардуино и шлет ему в зависимости от того какой HTTP запрос пришел команды а ардуинка уже командует L298N.
Как бы получше реализовать этот процес общения? Нужно стабильное соединение, убрать из связки ардуино не предлагать, надо будет подключать довольно много всего, так что выводы ардуины понадобятся, еще и шифт регистрами расширять прийдется. Хотелось бы использовать наш модуль как мозги а ардуино как хаб для остальных устройств. Типа ардуино считывает с сонара данные и посылает их 8266 а он принимает решение куда дальше ехать и посылает команду ардуине(например проедь 10 см вперед и поверни на 30 градусов влево).
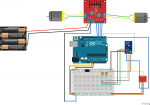
Текущее подключение на фото снизу.
rx - white
tx - blue
vcc - orange
ch_pd - yellow
reset - gray
gpio0 - green
gpio2 - purple
ground - black





Как бы получше реализовать этот процес общения? Нужно стабильное соединение, убрать из связки ардуино не предлагать, надо будет подключать довольно много всего, так что выводы ардуины понадобятся, еще и шифт регистрами расширять прийдется. Хотелось бы использовать наш модуль как мозги а ардуино как хаб для остальных устройств. Типа ардуино считывает с сонара данные и посылает их 8266 а он принимает решение куда дальше ехать и посылает команду ардуине(например проедь 10 см вперед и поверни на 30 градусов влево).
Текущее подключение на фото снизу.
rx - white
tx - blue
vcc - orange
ch_pd - yellow
reset - gray
gpio0 - green
gpio2 - purple
ground - black
Последнее редактирование:
")







