kotovasia
New member
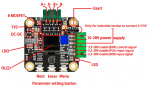
Подключал к ESP32-S3 двигатель mks servo42d и еще драйвер dm542.
В коде написал для проверки
В начале вроде завелось но у меня плохие dupon соединения и пока шевелил иногда дёргалось но когда вынул разъём общий была искра и сгорела esp.
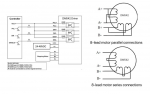
Вопрос в том правильно ли я подключал выводы?
И у servo42d и у dm542 по схеме есть внутренние подтягивающие резисторы.

В коде написал для проверки
C++:
// Define pin connections
const int stepPin = 3; // Pin for Step signal
const int dirPin = 4; // Pin for Direction signal
const int enPin = 5; // Pin for Enable signal
#define RGB_BRIGHTNESS 40 // Change white brightness (max 255)
void setup() {
// Set pin modes
pinMode(stepPin, OUTPUT_OPEN_DRAIN);
pinMode(dirPin, OUTPUT_OPEN_DRAIN);
pinMode(enPin, OUTPUT_OPEN_DRAIN);
// Enable the driver (set LOW to enable)
digitalWrite(enPin, LOW);
// Set direction (LOW for one direction, HIGH for the other)
digitalWrite(dirPin, LOW); // Change to HIGH for reverse direction
}
void loop() {
// Send step pulses
for (int i = 0; i < 400; i++) { // Number of steps
digitalWrite(stepPin, HIGH);
digitalWrite(RGB_BUILTIN, HIGH); // Turn the RGB LED white
delayMicroseconds(1000); // Pulse width
// Turn the RGB LED white
digitalWrite(stepPin, LOW);
delayMicroseconds(1000); // Time between steps
}
digitalWrite(RGB_BUILTIN, LOW);
// Optionally, add a delay before changing direction or stopping
delay(1000); // Wait for a second before next movement
// Change direction if needed
digitalWrite(dirPin, !digitalRead(dirPin)); // Toggle direction
}Вопрос в том правильно ли я подключал выводы?
И у servo42d и у dm542 по схеме есть внутренние подтягивающие резисторы.
