Flash and Authorize BK3432-Tuya Developer Platform-Tuya Developer
This topic describes how to flash the firmware to the BK3432 chip and autho......
 developer.tuya.com
developer.tuya.com
Вспышка и авторизация BK3432
Последнее обновление: 14.06.2024 22:55:54скачать
В этом разделе описано, как обновить прошивку чипа BK3432 и настроить его для подключения к платформе разработчиков Tuya. BK3432 поддерживает обновление прошивки только через SPI.
Прошивка BK3432 состоит из трёх частей: загрузчик, стек и приложение.
- bk3432_ble_app.bin: двоичный файл приложения.
- bk3432_ble_app_app.bin: двоичный файл с обновлением приложения.
- bk3432_ble_app_merge.binДвоичный файл после объединения bim, stack и app.
- bk3432_ble_app_stack.bin: двоичный файл со всем обновлением прошивки.
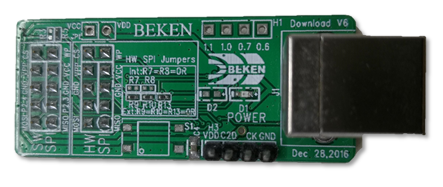
Мигалка BEKEN SPI
Вы можете приобрести мигалку у поставщика чипов или обратиться к своему менеджеру по работе с клиентами.
Программист

Процедура
- Подключите провода (SW SPI), как показано ниже.
Мигалка BEKEN SPI МОСИ МИСО П2.4 П2.3 GND ВПП VCC Пин BK3432 Р04 Р05 Р06 Р07 GND ПЕРВЫЙ +3В
Если вы используете плату для разработки BEKEN, вы можете подключить её напрямую к компьютеру без проводов. Для других плат необходимо проводное соединение. - Загрузите инструмент HID Download Tool от BEKEN для обновления прошивки.
- Откройте инструмент загрузки HID, выберите Режим загрузки> Выбор порта> Программное обеспечение SPI SOFT.
- Выберите BK3432 для управления чипом, выберите прошивку и нажмите «Загрузить прошивку».
- Проверьте вывод информации с UART1.
- После прошивки отключите устройство BEKEN SPI flasher от BK3432.
- Подключите BK3432 к компьютеру с помощью преобразователя USB в TTL.
- Нажмите кнопку сброса, чтобы перезагрузить BK3432.
Если информация выводится через последовательный порт, это означает, что прошивка работает правильно.
Получить лицензию
Дополнительную информацию см. в разделе Авторизация модулей серии Bluetooth LE.
Перепрошивка и авторизация
- Подключите UART2 на чипе к преобразователю USB в TTL.
- Откройте платформу авторизации Burning Authorization Platform модуля Open Cloud и включите функцию Only Auth.
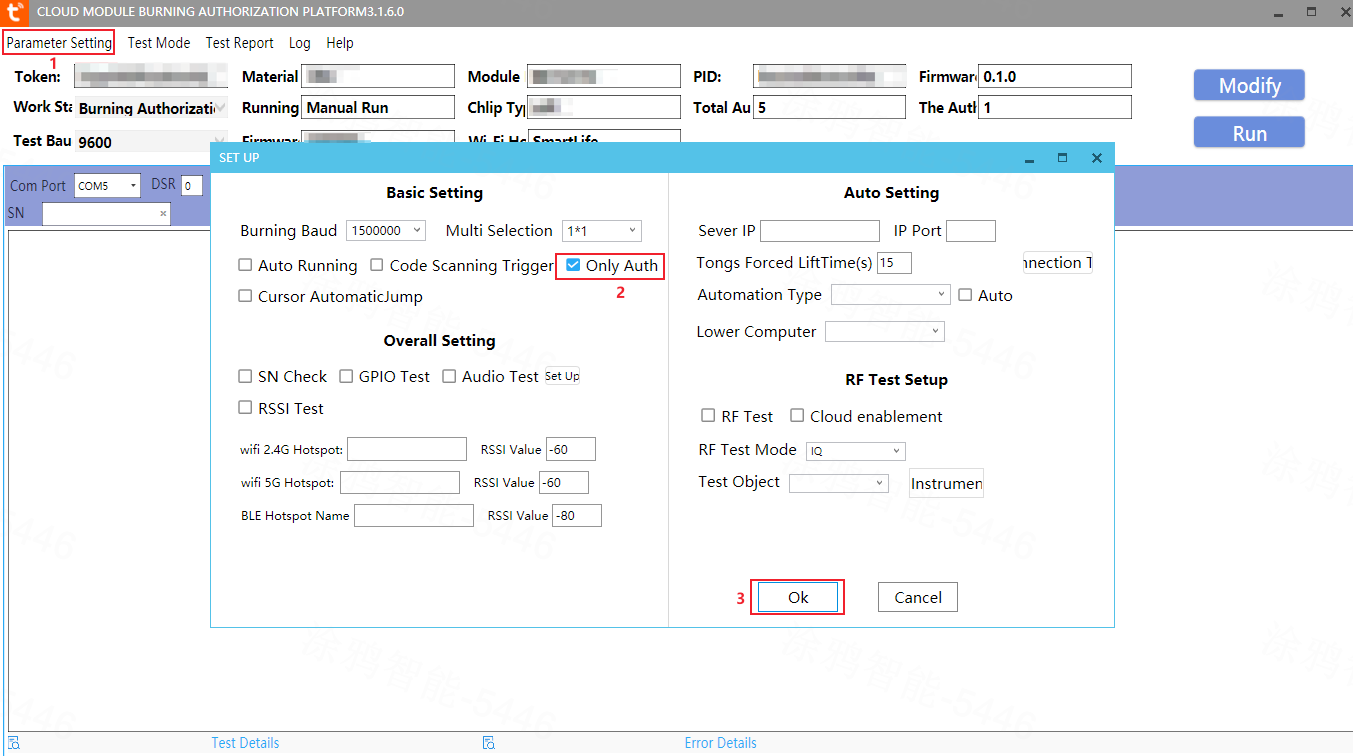
В коде указана скорость передачи данных. Убедитесь, что вы настроили программное обеспечение в соответствии с кодом.
// Initialize UART component
#if (UART_DRIVER)
uart_init(921600); //log
uart2_init(115200); //Authorization and Uart CMD
")