Прикладное ПО
Наконец подошли к тому, ради чего система создавалась. А именно – к реализации прикладной задачи.
Любая прикладная программа должна получать исходные данные, обрабатывать их и выдавать результат. Так же, возможно, система должна сообщать текущее состояние.
Исходными данными для контроллера теплого пола являются:
- Данные датчиков – система не привязана к конкретным датчикам. Для каждого датчика формируется уникальный идентификатор. Для радио-датчиков их идентификатор дополняется до 16 бит нулями, для датчиков 1Wire на основании их внутреннего идентификатора вычисляется CRC16 и используется в качестве идентификатора датчика. Таким образом, все датчики имеют идентификаторы длиной 2 байта.
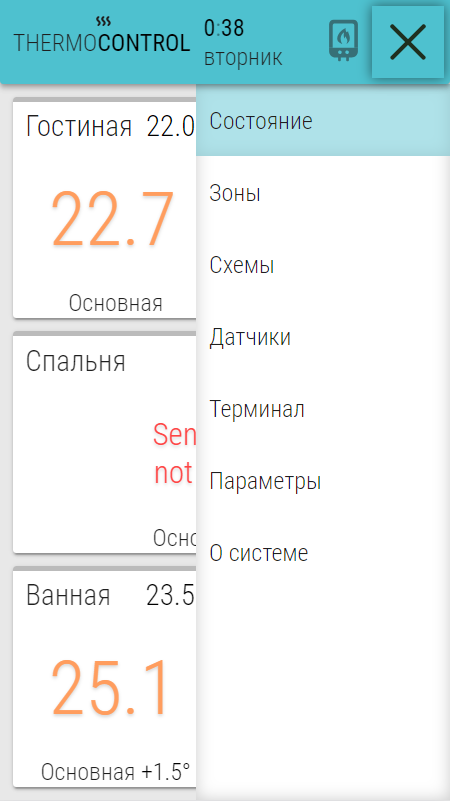
- Данные о зонах отопления – число зон не фиксировано, максимальное количество ограничено используемым модулем реле. С учетом этого ограничения так же разрабатывался WEB интерфейс.
- Целевая температура и расписание – я постарался сделать максимально гибкие настройки, можно создать несколько схем отопления и можно даже на каждую зону назначить свою схему настроек.
Таким образом есть некоторое количество настроек, которые надо как-то задавать, и есть некоторое количество параметров, которые система сообщает как текущее состояние.
Для общения контроллера с внешним миром я реализовал командный интерпретатор, который позволил реализовать как управление контроллером, так и получать данные о состоянии. Команды передаются контроллеру в человекочитаемом виде, и могут передаваться через UART или WEB сокет (при желании можно реализовать поддержку других протоколов, например telnet).
Строка команд начинается со знака '#' и оканчивается нулевым символом либо символом перевода строки. Все команды состоят из имени команды и операнда, разделенных двоеточием. Для некоторых команд операнд не обязателен, в этом случае двоеточие и операнд не указываются. Команды в строке разделяются запятой. Например:
#ZonesInfo:1,SensorsInfo
И конечно же список команд начинается с команды Help, которая выводит список всех допустимых команд (передаваемые команды для удобства восприятия начинаются со знака '>' вместо '#'):
Код:
>help
Help
SetZonesCount
Zone
SetName
SetSensor
...
LoadCfg
SaveCfg
#Cmd:Help,CmdRes:Ok
Особенностью реализации командного интерпретатора является то, что информация о результате выполнения команды выдается так же в виде команды или набора команд:
Код:
>help
…
#Cmd:Help,CmdRes:Ok
>zone:123
#Cmd:Zone,Value:123,CmdRes:Error,Error:Zone 123 not in range 1-5
>SchemasInfo
#SchemasCount:2
#Schema:1,Name:Основная,DOWs:0b0000000
#Schema:2,Name:Гараж,DOWs:0b0000000
#Cmd:SchemasInfo,CmdRes:Ok
На стороне WEB клиента так же реализован командный интерпретатор, который принимает эти команды и преобразует их в графический вид. Например:
Код:
>zonesInfo:3
#Zone:3,Name:Спальня,Sensor:0x5680,Schema:1,DeltaT:-20
#Cmd:ZonesInfo,CmdRes:Ok
WEB интерфейс передал запрос контроллеру о зоне номер 3, и получил в ответ название зоны, идентификатор датчика, привязанного к зоне, идентификатор схемы, назначенной зоне и коррекцию температуры для зоны. Командный интерпретатор не понимает дробных чисел, поэтому температура передается в десятых долях градуса, т.е. 12.3 градуса это 123 десятых долей.
Ключевой особенностью является то, что на любую команду, вне зависимости от способа ввода команды, контроллер отвечает сразу всем клиентам. Это позволяет отображать изменение состояния сразу во всех сеансах WEB интерфейса. Т.к. основной транспорт обмена между контроллером и WEB интерфейсом это WEB сокеты, то контроллер может передавать данные без запроса, например когда приходят новые данные от датчиков:
Код:
#sensor:0x5A20,type:w433th,battery:1,button_tx:0,channel:0,temperature:228,humidity:34,uptime_label:130308243,time_label:20180521T235126
Или о том например, что данные зоны необходимо актуализировать:
Код:
#Zone:2,TargetTemp:220,CurrentTemp:228,Error:Ok
WEB интерфейс контроллера построен на использовании текстовых команд. На одной из закладок интерфейса имеется терминал, с помощью которого можно вводить команды в текстовом виде. Так же эта закладка, в целях отладки, позволяет узнать какие команды отправляет и получает WEB интерфейс при различных действиях пользователя.
Командный интерпретатор позволяет легко менять и наращивать функционал устройства, за счет изменения существующих команд и добавления новых. При этом отладка подобной системы значительно упрощается, т.к. общение с контроллером происходит исключительно на человекочитаемом языке.